For the obstacle avoidance task, the micromouse is programmed to navigate around common obstacles such as walls, furniture legs, and other robotic mice without making physical contact. To accomplish this, we equipped the micromouse with modulated infrared detectors and mechanical switches. These sensors detect obstacles in the path of the micromouse, enabling it to maneuver around them seamlessly.
Avoiding collisions and entrapments is crucial, as the micromouse’s performance is negatively impacted in such scenarios, potentially resulting in deductions during evaluations. We have undertaken rigorous testing and continuous refinement of the micromouse to optimize its avoidance strategies.
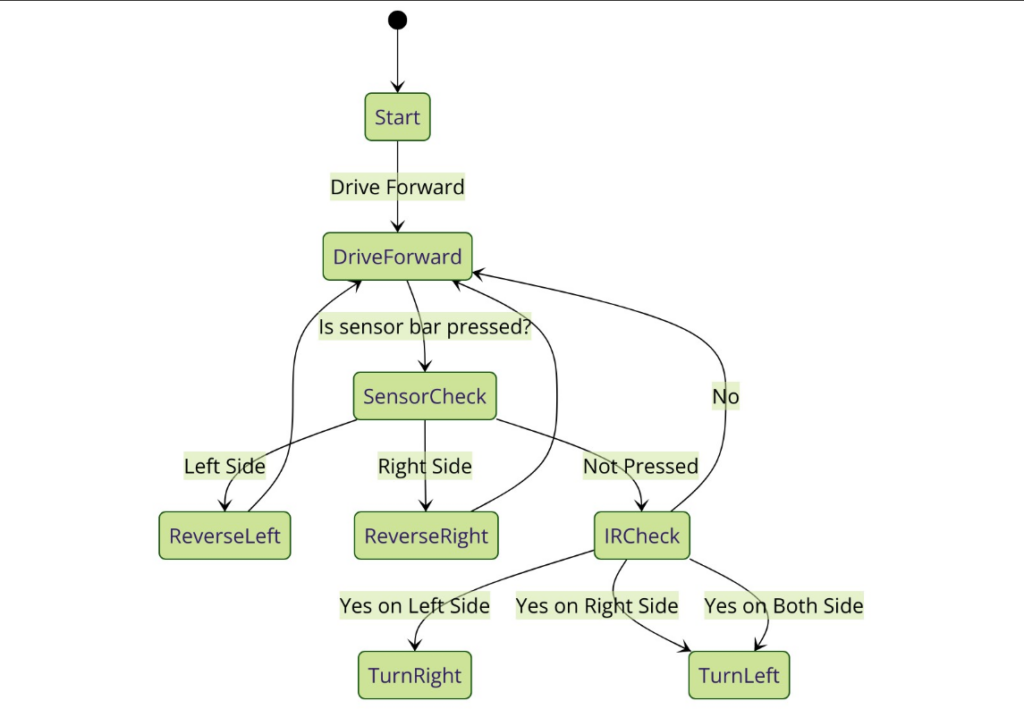
The flowchart clearly demonstrates this obstacle avoidance strategy. It shows the micromouse initially moving forward; if an obstacle makes contact with the sensor bar, the micromouse will reverse either to the left or right depending on which side detected the obstacle. If no direct contact is detected, the micromouse checks for decreased infrared signals. Based on where the decrease occurs—left, right, or both—the micromouse appropriately adjusts its course to avoid the obstacle, either turning right or left before resuming its forward path. This systematic approach ensures efficient navigation through complex environments.