The development of the white line mode for the micromouse was centered on a strategic configuration of LEDs and sensors, particularly designed to distinguish between white and black surfaces. This mode operates through a circuit where the reflection of light from an LED varies significantly between a white and a black surface. On a white surface, the reflected light is much more intense, leading to a decrease in circuit resistance and consequently lowering the output voltage.
To effectively navigate and remain within the designated combat arena against other micromice, a white line sensor was engineered. This sensor was adept at following a 50mm white line set against a matte black background. Its design incorporated a straightforward half bridge circuit that translated changes in resistance based on light exposure. Key components included resistors, an LED, and a Light Dependent Resistor (LDR), arranged on a veri board. The LED and LDR were configured in series with resistors R1 (330 Ω) and R2 (10k Ω), respectively. The sensor’s output voltage (Vout) was higher when positioned over a black surface due to less light falling on the LDR and thus higher resistance. Conversely, when over a white surface, the resistance dropped, leading to a lower Vout. This sensor system was thoroughly tested and eventually scaled up to equip the micromouse with four such sensors to optimize its performance in competitions.
The sensors were strategically positioned to enhance line tracking and prevent the micromouse from veering off the combat ring’s edge. Each sensor was crucial for detecting the precise location relative to the ring barriers and the line, using an array of 330KΩ and 10KΩ resistors to effectively manage changes in light reflection and resistance. This arrangement provided a cost-effective and compact solution to interface with the microcontroller, ensuring robust navigation and competitive functionality in micromouse challenges.
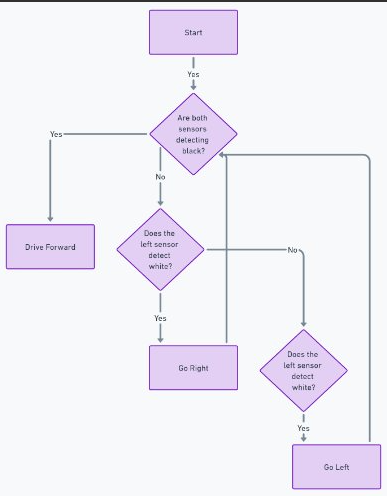
The diagram is a flowchart detailing the logic used by a micromouse robot to navigate based on sensor inputs. It starts the process, then checks if both sensors detect black—if so, it drives forward. If the left sensor detects white, the robot turns right. If not, it checks the left sensor again; if it detects white at this point, the robot turns left. This decision-making process helps the micromouse follow a line and maneuver based on the color detected by its sensors.
you can see a video of the white line showing in are gallery.