
Welcome to the Team Foxtrot website! We are a team of 4 electrical and electronics engineering students. We are a young and inspired team that aims to build a micromouse as our second-year Electrical and Electronic Engineering project during this 2023/24 academic year.
On this website, you will find all the information as to what we built, how we built it, and what the thought process was behind our decisions made throughout this project, where also we will document all the technical files that were used to build our micromouse.
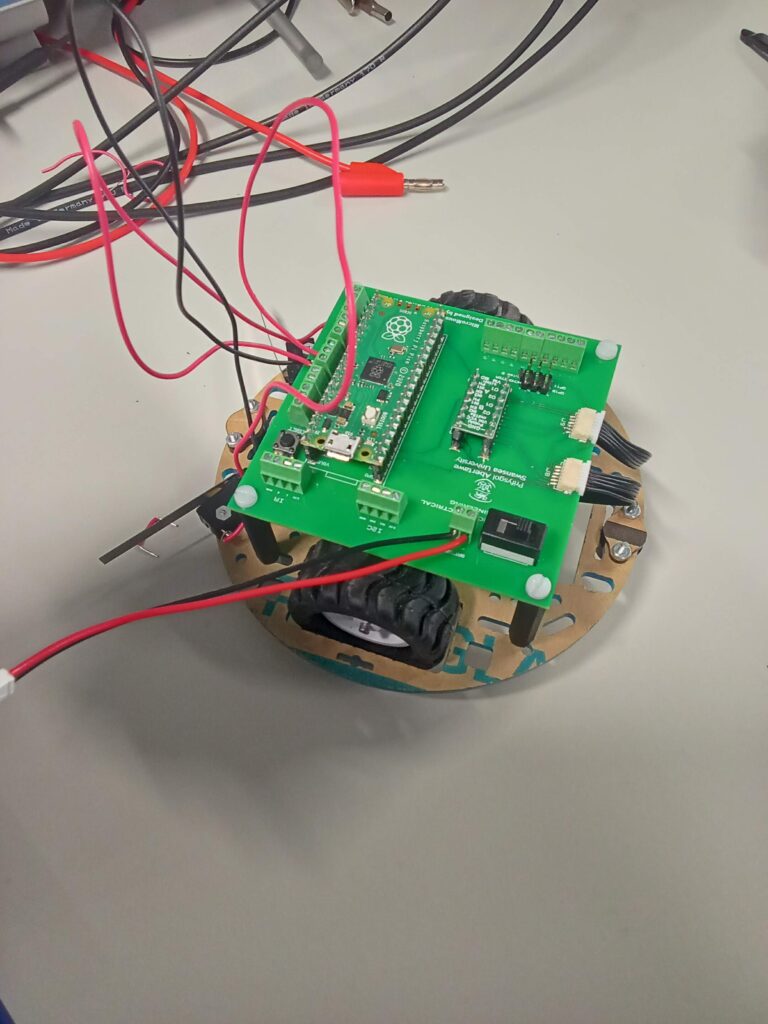
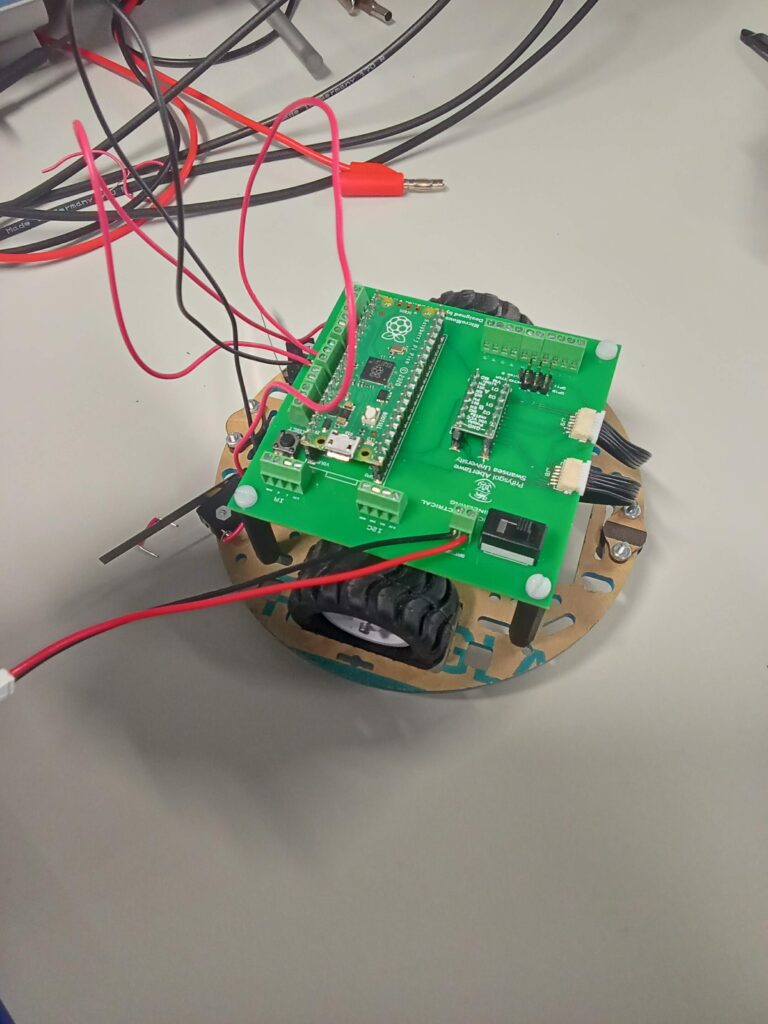
To work effectively, the micromouse is loaded with sensors to enable white light following, obstacle avoidance and combat. The micromouse runs by a portable battery that can be re-attached and is easily charged therefore ensuring sustainability for our design.
Our Micromouse’s requirements are;
- White Line Following
- Obstacle Avoidance
- Combat
Obstacle Avoidance
Our robot will be able to reroute its direction as it collides with another object, when it touches the security bars, it will redirect itself to the opposite direction. Our goal is to avoid physical contact with walls and every obstacle.
White line following
We want our micromouse to be able to follow a white line.
Our aim is for the micromouse to carefully follow a white line and avoid the black parts of the board and vice versa without any deviation from the white line.
Combat