This month we had a few assessment deadlines, so we concentrated majorly on completing them, as we had to complete the PCB design, ensure that the sensors were working properly and ensure that our micromouse prototype was running fine. Finally, we had to complete our lab diaries in teams of two, At the beginning of the month, it did seem like a lot of work to complete, but luckily enough we were able to do them step by step. We had a test with Dr Jobling and Dr Timothy Davies to confirm that our micromouse was running in a straight line and that it could perform obstacle avoidance, we had a practical test on our sensors on the same day. I am glad that our team could handle the pressure of deadlines and still work together. We also added some more news to our News Page so check that out, The next blog will be out in February.
This afternoon, we had a test with Dr Jobling and Dr Timothy Davies to confirm that our micromouse was running in a straight line and that it was able to perform obstacle avoidance, we had a practical test on our sensors. We were a bit worried because one of sensors on the board seemed to be more sensitive than the other, but Dr Davies was still impressed. Also, we completed the PCB design on proteus, and we were lucky enough to get some advice from Dr Timothy as he said that our board was a little empty and that we needed to add more sensors to our board.
The micromouse is made up of sensors for productivity and effectiveness of the motors, it has the microswitch, the white line sensors, the ultrasonic sensors and finally the infrared sensors. First, the Infrared sensors and microswitches are the main sensors for detecting obstacles. Luckily for us, the microswitch was attached to our prototype for building the motors.
Now for the infrared sensors, we had to build according to the schematic given to us, as the Infra-red sensors are far more useful in detecting avoidance even before collision. We have a complex circuit to generate and demodulate the light at two frequencies, at 40KHz pulsed at 20Hz. The double modulation makes the sensors, immune to interference and reduces the current consumption.
Our goal for Obstacle avoidance, is for the micromouse must avoid contact with walls and every obstacle without physical contact, we would like the micromouse to move away swiftly from obstacle.
To test our circuit, we connected the probes at every points A to E to confirm that our circuit was connected properly and can be used on our PCB
Below we have the schematic design of the Infrared sensor with an optical filter to detect obstacles.
Point A
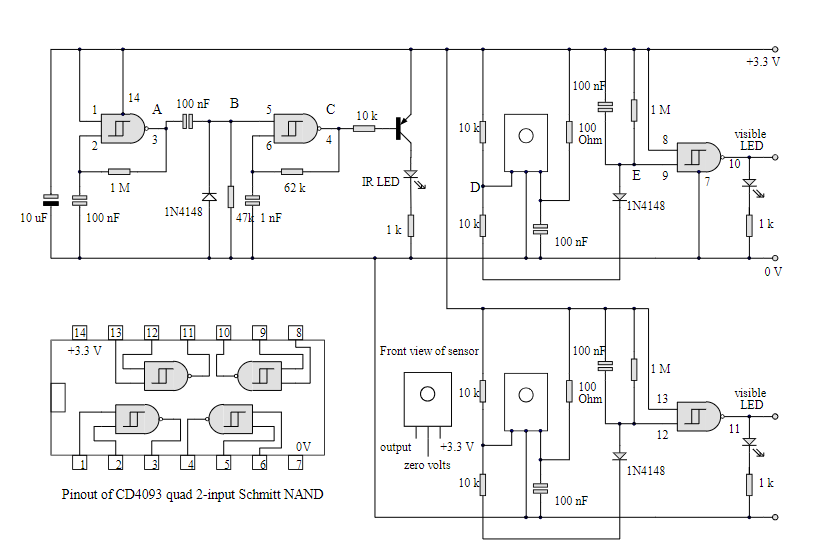
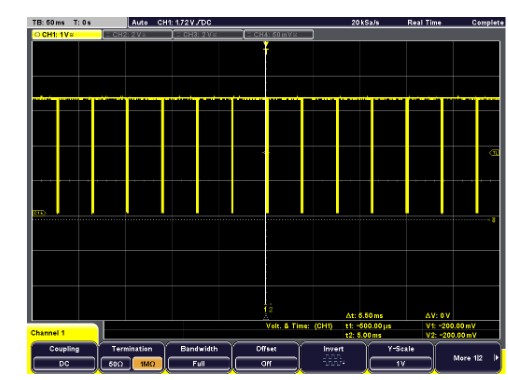
For point A, on the schematic above, there should be a 20Hz square waveform on the oscilloscope. That is shown below, and it proves that we connected Point A correctly.
Our result on the oscilloscope is shown on the right.
Point B
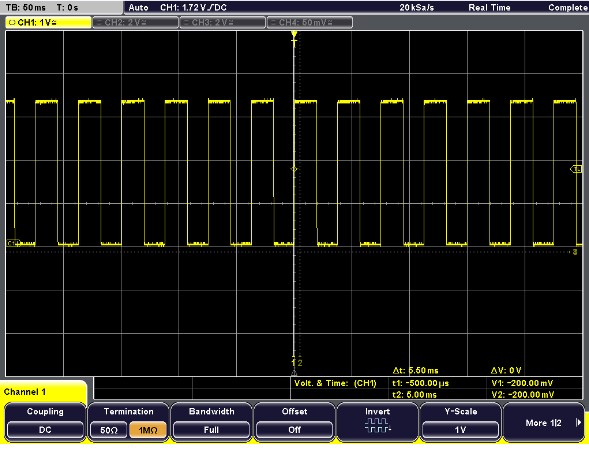
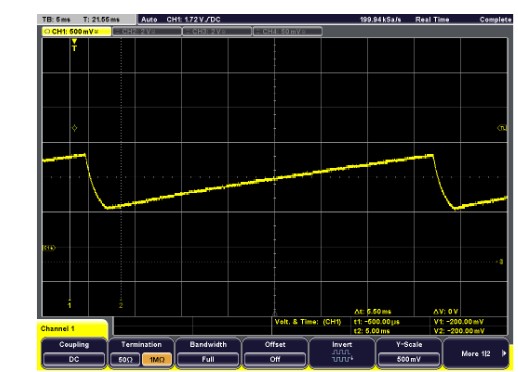
Moving onto to Point B, according to the handbook, we should be getting a differentiated square wave, which is shown below.
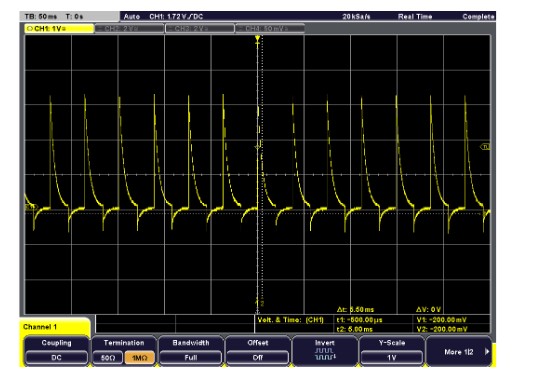
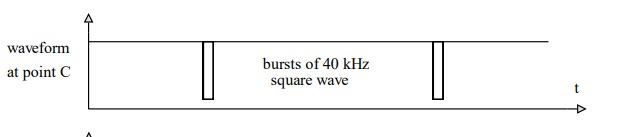
Point C
Point C has a burst of 40KHz square wave.
Point D
Point D is the output of the IR Sensors
Point E
Point E is the threshold voltage for detection
P.S The schematic design is given for the Infrared circuit is given by Dr Jobling and Dr Davies our tutors.
This month, we started building the PCB circuit so we could have the circuit ready for January for breadboarding for the main bits on the mouse, also last month we struggled to get the sensors ready because we had some issues with the coding, and we had not soldered the wires to the sensors, so the motor just kept spinning round without making any movement, but we managed to get it fixed with Doctor Davies’s help. This month we also completed the experiments on the raspberry pi board, although we work as a team and design the micromouse on the raspberry pi board, Doctor Jobling thought it was good idea to make us work in teams of 2 and do experiments on the raspberry pi board to give us more idea as to how it works and when we were done with the experiments ,we were able to fully concentrate on the micromouse.
After the experiments Andrew and I added a few more details to the website to improve it, if you take a look at the website, a few things that were not there last month was added, like the new pages in the menu, the news, engineering in society section and so on. We added some pictures and a short biography on all the members section too. And now we finally have a logo, a cute one at that. Check out the new section for more information and see you next month.
We are currently starting the PCB design of the IR circuit on the Proteus software. Mr David Moody gave a briefing about it, and it needs to be completed on the 5th of December. Also, our website is coming along really nicely so Andrew would be moving on to starting a new project on the PCB, we would be helping him later on, but he’s got a head start. We have also got a great going on the breadboards.
We got our team members last month and I was excited to meet them, we had to write our strengths before we were chosen as team members so when we formally met each other as team members we shared our strengths and skills with each other. I was a bit worried at first about meeting my team members, but I felt better and reassured once I met them in person. We then made decisions on our roles within the team using the team matrix as guide where I was then chosen as the manager and planner of my team. I wanted to do more than just lead so I supported Andrew as the Web master, and I am the Graphic Designer for my team.
As we started working on the project, a few things changed as we were still adjusting to our roles that we had chosen on our skill matrix, so we did work together at first on the breadboarding while Andrew waited with our module supervisor Professor Chris Jobling to set up the website. We also successfully submitted our first assignment as a team on time which made me really thrilled. Afterwards I started working on the website and I was able to set up the Home page on WordPress. We are all going to be posting our blogs individually every month so I’ll posting our progress on the micromouse every month.