During February I soldered the PCB which was an enjoyable task to do, and then also made the white line sensors so we can progress in that area of the micro mouse. The white sensor board worked correctly, and we are currently trying to calibrate them so that they work smoothly. I have also started on the creation of the shell although I am struggling with learning the SolidWorks software as it seems quite complex, but I will be watching some videos on YouTube to aid me. This SolidWorks will be what I am working on in March as well.
Happy New year! We had a Christmas break and exams from late December to January, and we came back to the labs this week, we designed the PCB before the break and Mr Moody kindly printed it on Tuesday, Ethan started work on the PCB, drilling holes for the circuits and making a smaller circle. Andrew and I also got to work building the white line sensors on the breadboard and then we are currently adding it to the microcontroller. Check out a few pictures from our PCB and white line sensor prototype.
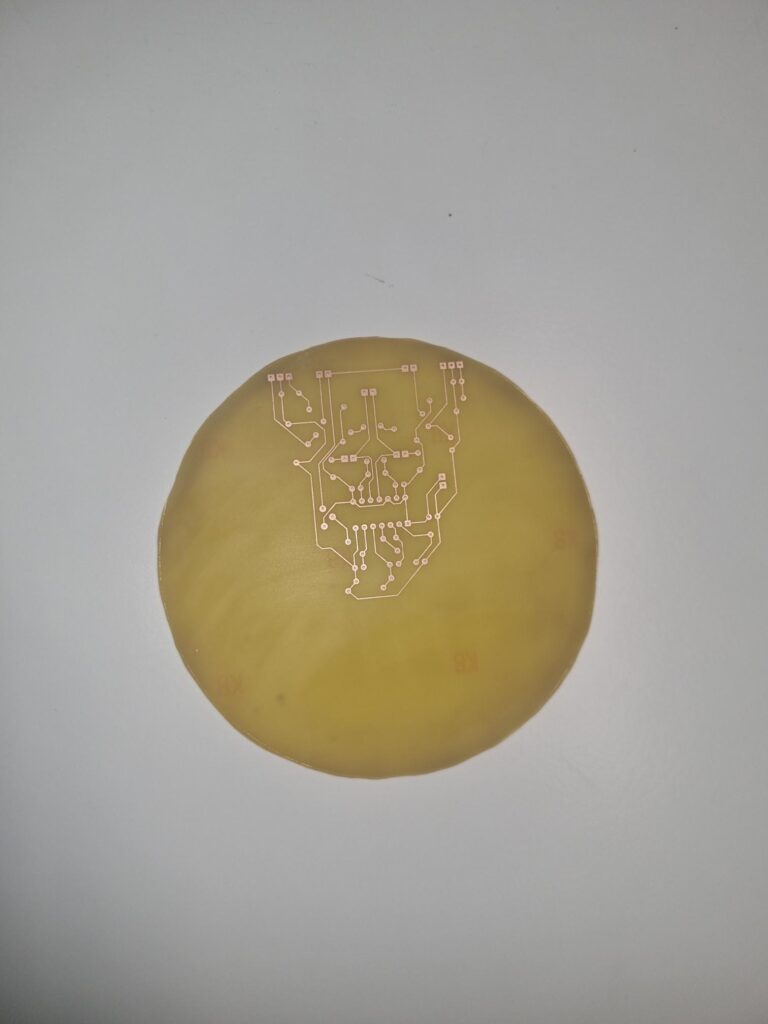
On the left is the first picture of our PCB after drilling holes for the circuit, the edges are still a little rough.
On the right is the final picture of the PCB after using the sander to get a more accurate circle.
During this month we completed and uploaded the PCB design to be examined by Mr.Moody. We also did some work with the sensors to ensure they were working correctly. Dr Davies and Dr Joblings performed their test to see if our micro mouse was running in a straight line, and to also test the sensor circuit we built on the breadboard. In the later parts of the month I changed my focus onto revising for the upcoming exams so did not focus on the micro mouse project.
This month we had a few assessment deadlines, so we concentrated majorly on completing them, as we had to complete the PCB design, ensure that the sensors were working properly and ensure that our micromouse prototype was running fine. Finally, we had to complete our lab diaries in teams of two, At the beginning of the month, it did seem like a lot of work to complete, but luckily enough we were able to do them step by step. We had a test with Dr Jobling and Dr Timothy Davies to confirm that our micromouse was running in a straight line and that it could perform obstacle avoidance, we had a practical test on our sensors on the same day. I am glad that our team could handle the pressure of deadlines and still work together. We also added some more news to our News Page so check that out, The next blog will be out in February.
This afternoon, we had a test with Dr Jobling and Dr Timothy Davies to confirm that our micromouse was running in a straight line and that it was able to perform obstacle avoidance, we had a practical test on our sensors. We were a bit worried because one of sensors on the board seemed to be more sensitive than the other, but Dr Davies was still impressed. Also, we completed the PCB design on proteus, and we were lucky enough to get some advice from Dr Timothy as he said that our board was a little empty and that we needed to add more sensors to our board.
The micromouse is made up of sensors for productivity and effectiveness of the motors, it has the microswitch, the white line sensors, the ultrasonic sensors and finally the infrared sensors. First, the Infrared sensors and microswitches are the main sensors for detecting obstacles. Luckily for us, the microswitch was attached to our prototype for building the motors.
Now for the infrared sensors, we had to build according to the schematic given to us, as the Infra-red sensors are far more useful in detecting avoidance even before collision. We have a complex circuit to generate and demodulate the light at two frequencies, at 40KHz pulsed at 20Hz. The double modulation makes the sensors, immune to interference and reduces the current consumption.
Our goal for Obstacle avoidance, is for the micromouse must avoid contact with walls and every obstacle without physical contact, we would like the micromouse to move away swiftly from obstacle.
To test our circuit, we connected the probes at every points A to E to confirm that our circuit was connected properly and can be used on our PCB
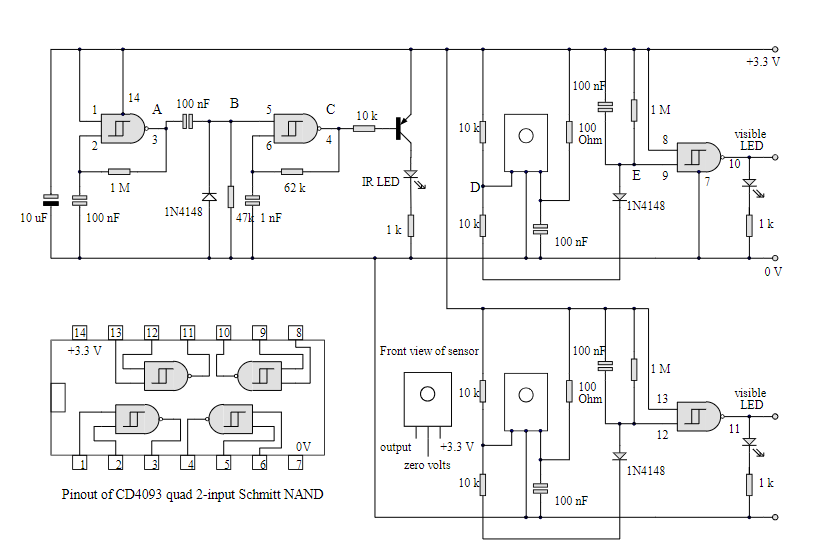
Below we have the schematic design of the Infrared sensor with an optical filter to detect obstacles.
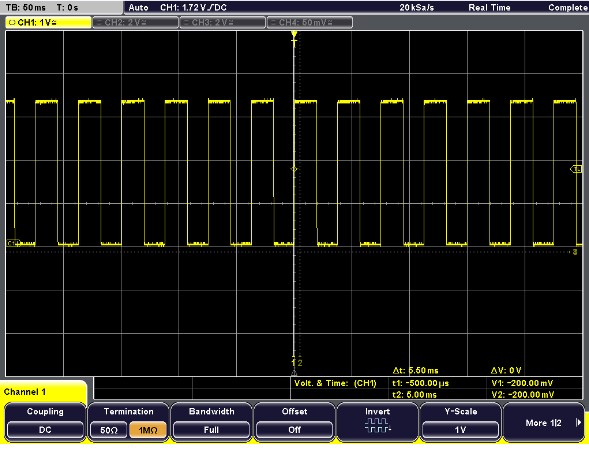
Point A
For point A, on the schematic above, there should be a 20Hz square waveform on the oscilloscope. That is shown below, and it proves that we connected Point A correctly.
Our result on the oscilloscope is shown on the right.
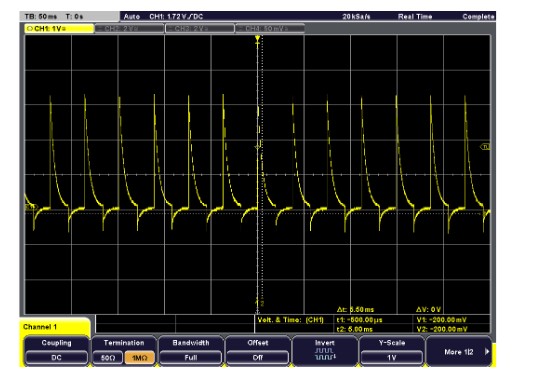
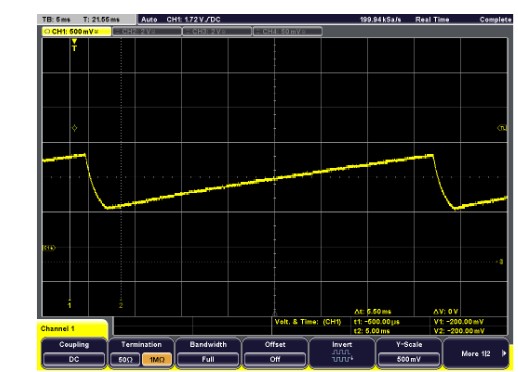
Point B
Moving onto to Point B, according to the handbook, we should be getting a differentiated square wave, which is shown below.
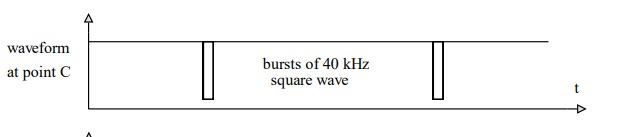
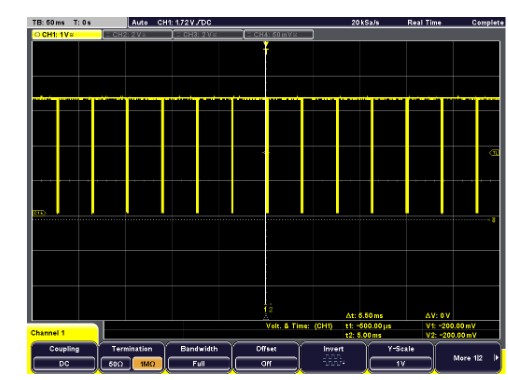
Point C
Point C has a burst of 40KHz square wave.
Point D
Point D is the output of the IR Sensors
Point E
Point E is the threshold voltage for detection
P.S The schematic design is given for the Infrared circuit is given by Dr Jobling and Dr Davies our tutors.
During the month of November me and Ethan spent the majority of our time getting our micro mouse to run and have function touch bar sensors. We had a few set backs and plenty to troubleshoot. Firstly the tachometers on the motors were attached backwards and secondly the motors turn in the opposite direction as to the previous years motors. For the tachometers we carefully removed and flipped them and to have the motors move forward as intended we needed to alter some code. Finally our last issue was following the guidance of the handbook we wired the touch bars in a slightly different way which meant we had to make further minor adjustments to the code. After this was all complete we had a working micro mouse and it was very satisfying seeing our hard work in troubleshooting paying off. As a group we also looked at ethics in engineering which gave us all a better understanding of each other and how to conduct ourselves in the professional field of engineering.
The next steps will be to finalise testing of our IR sensors and breadboard components so they can be soldered to our PCB design which will be completed early next month. Following on to this we will integrate this onto our micro mouse and hopefully by the end of next month we will have functioning micro mouse with both touch bar and IR sensors., which is very exciting to see.
This month, we started building the PCB circuit so we could have the circuit ready for January for breadboarding for the main bits on the mouse, also last month we struggled to get the sensors ready because we had some issues with the coding, and we had not soldered the wires to the sensors, so the motor just kept spinning round without making any movement, but we managed to get it fixed with Doctor Davies’s help. This month we also completed the experiments on the raspberry pi board, although we work as a team and design the micromouse on the raspberry pi board, Doctor Jobling thought it was good idea to make us work in teams of 2 and do experiments on the raspberry pi board to give us more idea as to how it works and when we were done with the experiments ,we were able to fully concentrate on the micromouse.
After the experiments Andrew and I added a few more details to the website to improve it, if you take a look at the website, a few things that were not there last month was added, like the new pages in the menu, the news, engineering in society section and so on. We added some pictures and a short biography on all the members section too. And now we finally have a logo, a cute one at that. Check out the new section for more information and see you next month.
This month we had significant progress regarding the basic structures of the micromouse. Ethan and Rhys were able to establish the code of the micro mouse in order to run forward, reverse, and walk in another direction, avoiding the obstacle. I started working on the PCB that will be used to implement the infrared sensors circuit. The website has improved from last month, as Dara and I improved its structure, creating all the basic pages and placing them into the main menu. For the following month before Christmas, we will try to implement the remaining features that need to be created and also finish the design of the website. I will finish constructing the PCB layout so then it can be printed to be sold next year when we come back from holidays.
The first point in the joint ethics statement that was put out by the engineering council is about honesty and integrity. I will uphold these values and principles throughout the project by communicating openly and honestly with the rest of the team, as well as being respectful of the other teams and their micro mouse. I will also be striving to avoid deceiving the other teams with false information that may affect their progress on their micro mouse.
Respect for life, law, the environment and public
Upholding the principles of being caring and understanding of how the materials I will use in the micro mouse will be important to me, especially with all the news at the moment about the widespread damage being done to the environment. Also, I will be communicating to the team about wanting to reuse components from the lab bins as well as from previous projects that are no longer used. To keep myself and others safe I will be adhering to the lab rules set out by the lab technicians and lecturers.
Accuracy and rigour
During this project I will be striving to ensure the safety and proper operation of the lab by making sure that I have received or am receiving the proper induction from the lab technicians. I will also be making sure to uphold some of the values also mentioned in the Honesty and Integrity heading which include the accuracy of information and data that we put on our webpage and to only give other teams honest answers if they ask me for help.
Leadership and communication
While I am not in a position of leadership within the team, I will still strive to promote equality, diversity and inclusion within the team as this would allow for multiple different viewpoints and solutions that can be put across by people with different backgrounds. I will also be challenging any statements made by team members or other teams that could damage the professionalism of our team to make sure our team will only be seen in a positive and friendly way.
IET rules of conduct
I make the commitment to upholding and understanding the IET rules of conduct to the best of my ability. This includes making sure all the information and content in the web page is correct and valid to my knowledge as well as keeping my skills up to date. This code of conduct’s provides a detailed basis for ethical practices within engineering.
To further improve my own knowledge and understanding of ethics in engineering I have watched some YouTube videos from channels such as CrashCourse(Engineering Ethics: Crash Course Engineering #27 – YouTube) which provided some other ethics and situation which are applicable. Another source of ethics which I have been interested in is the Engineering Commons Podcast (Episode 12 — Ethics | The Engineering Commons Podcast) which is an interesting listen.