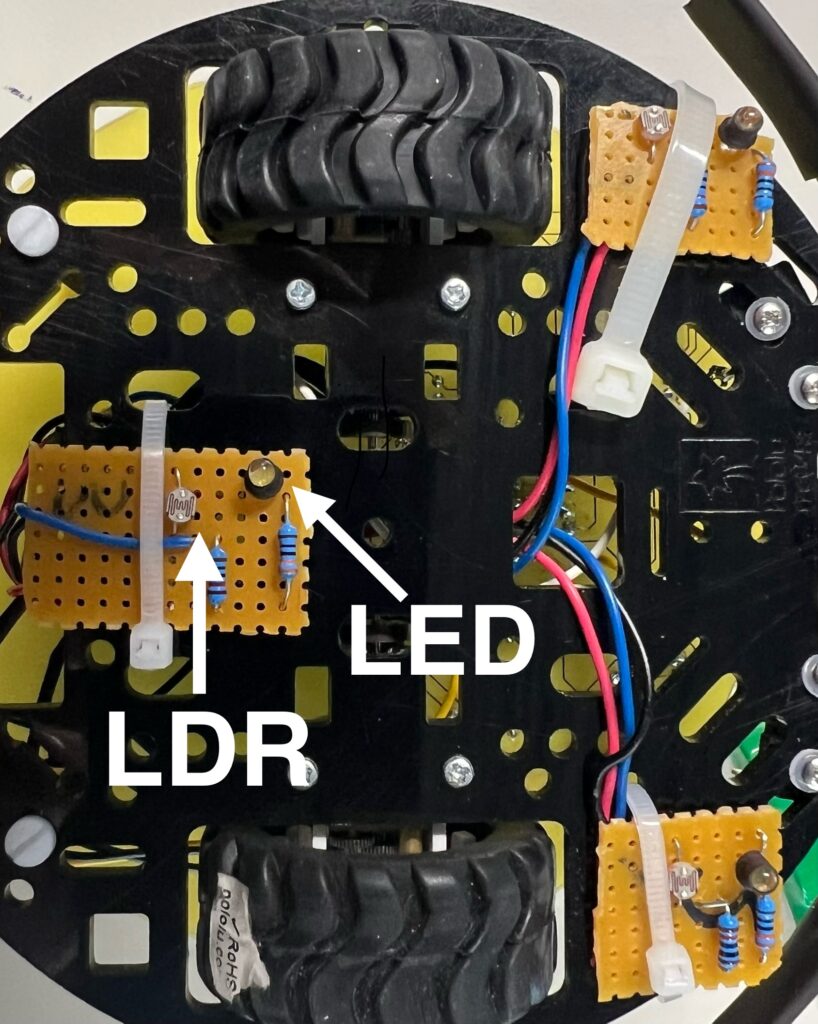
Our white line sensors each consisted of a simple circuit made up of an LDR (Light Dependent Resistor) a single white LED and two resistors. For our Micro-mouse we decided to include:
- One in the top left and right
- One for the rear
The White line sensors served 2 purposes:
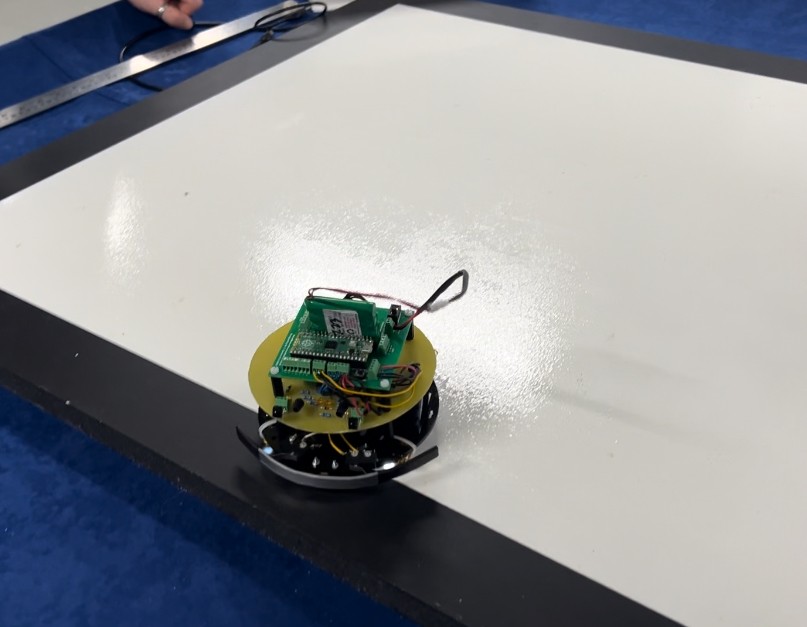
White Line Following…
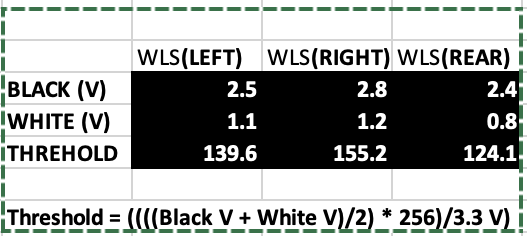
When shown over a dark surface most of the light is absorbed and therefore, High resistance = High Voltage.
When it is over a white reflective surface the light is reflected into the LDR meaning, low Resis = Low Voltage

Needing Data…
From this we could use its varying voltage values to create a numerical threshold when coding our sensors so that we could keep our micro mouse inside a white line surrounded by a black surface by changing its wheel speed for different scenarios.
Combat Time…
The objective of combat mode is to push the opposing micromouse out of the arena while staying inside to claim the win.
Similar to white line following except we would modify our code so that when the LEDs detected a high voltage (Black surface) we would programme it to avoid going in that same direction, keeping our mouse in the arena.
More Information about our Combat feature can be found here