During February we focused on getting our micro mouse to stop spinning in a circle, when doing obstacle avoidance our micro mouse couldn’t follow a straight line. We thought it was a hardware issue, maybe the motors were not spinning evenly or their was uneven power ,it turned out to be a code issue. The function that controlled the difference in speed was not algorithmically correct ,so we spent time figuring out the correct solution and it was solved. We were able to go in a straight line. With that solved we started line following .We created an LDR circuit ,it functioned by shining light on a surface and use a light-dependant resistor to change the voltage of the circuit allowing us to gather an input.
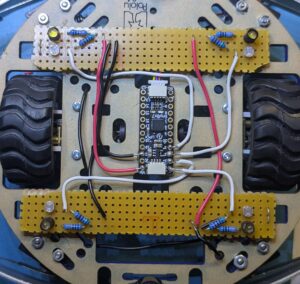
We also stuck our seesaw board onto our micro mouse ,soldered the LDR circuit’s to the seesaw boards and then we began to start code the line following ,our objective was to get the micro mouse to following a rectangular white line and closely as it could. We started off by taking reading of white and black surface to create a threshold that our mouse would use to stay on the line.
0 Comments