
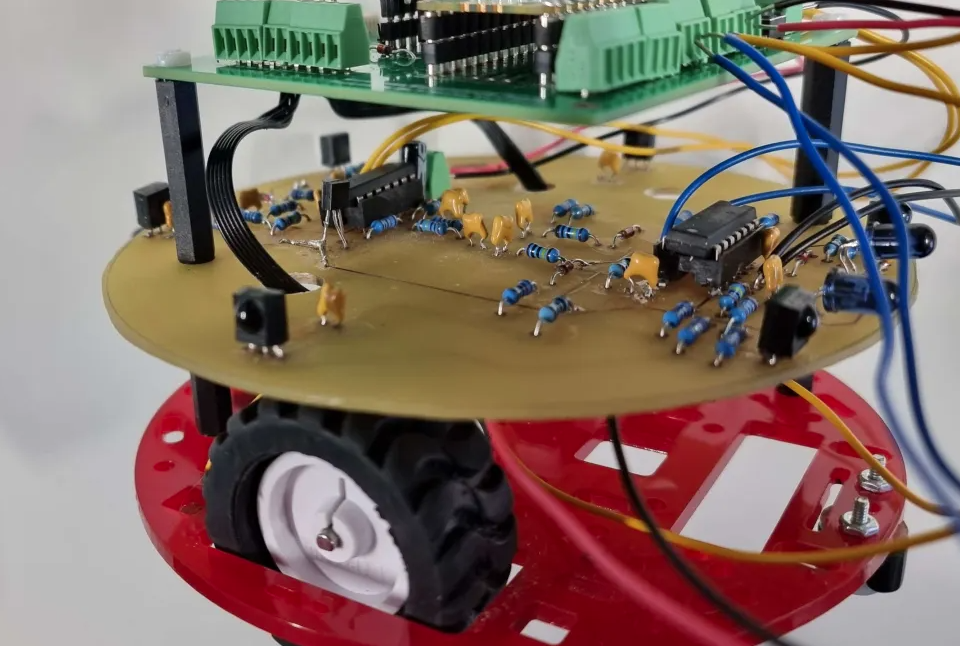
February has been a good month for Team Juliet’s progress! We have seen brilliant development with our physical bot. The IR PCB soldering is finally finished!
Before mounting the IR PCB to the MicroMouse, I made a small external test board which would send the correct IR pulses, which was used to fault-find issues on the PCB, and test the overall responsiveness of the circuit. A few small errors were made during the soldering process, but mostly it was smooth sailing!
The MicroMouse now responds to its environment using the IR PCB that has been mounted onto the chassis.
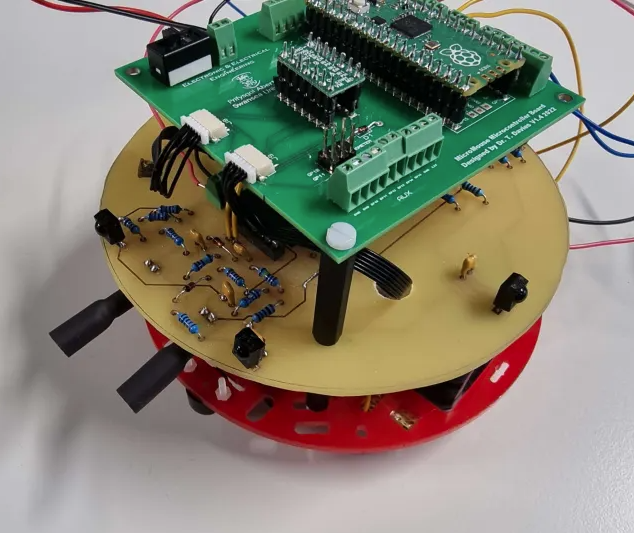
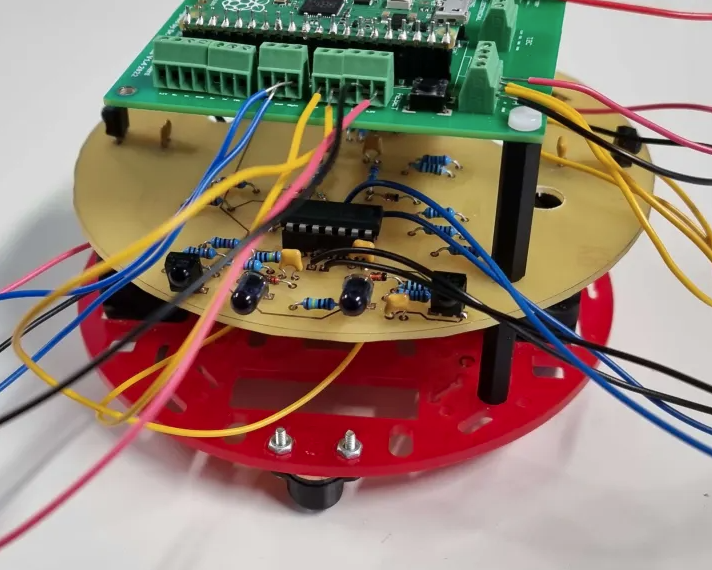
Above is the bot in it’s current state. As can be seen, the IR circuit has been mounted, and some larger cable management holes have also been drilled.
The white-line following circuit has been mounted on the underside of the chassis, but that is not yet fully functional.
No responses yet